Шасси робота. Схемы. Управление через LPT
Еще одна схема управления двигателями
Спасибо ArtemKAD за схему (см. форум).
Формат: pdf, Размер: 13Кб
{kind=link}
Если масса робота растет, лучше использовать более мощные моторы. Одним из зарекомендовавших себя решений являются обыкновенные моторчики от стеклоподъемников.
Формат: jpg, Размер: 33Кб
Удобный LPT-драйвер, с примерами его использования в Delphi-проектах.
Формат: zip, Размер: 31Кб
Окончательная версия схемы управления двигателями
Рабочая, собранная и протестированная схема. Представлены также схемы цоколевки и внешний вид деталей.
Формат: jpg (несколько картинок)
{kind=link}
ДПМ-30 - реверсируемый электрический двигатель постоянного тока. Применяется в военной радиоаппаратуре (радиорелейные станции, и т.д.) для подстройки контуров системами автонастройки.Обладая небольшими размерами достаточно мощен.
Длина корпуса - 5,6 см.
Полная длина - 7 см.
Диаметр корпуса - 3 см.
Штатное напряжение питания - 24...27 В. Однако вполне уверенно работает и на 12 В,с некоторой правда потерей мощности. Однако рулевой машинки робота пойдёт.
Потребляемый ток - в районе 0,1 А.
Формат: jpg, Размер: 25Кб
Детальная схема первого яруса робота
{kind=link}
За первый ярус принят остов робота. В задней части к прямоугольной квадратной раме основания крепится шасси: колеса, оснащенные моторчиками. Спереди монтируется треугольная рама рулевого механизма. Внутри рамы, на фанерном перекрытии, размещаются аккумулятор, и две платы: преобразователя напряжения и устройства управления двигателями. По углам несущей рамы устанавливаются круглые основания для стоек. Предполагается, что верхний каркас съемный (для более удобного доступа к системе шасси и питания в первом ярусе).
Формат: jpg, Размер: 93Кб
Трехскоростная система управления двигателями
Схема взята из книги Хейзермана, от легендарного Бастера. Управление скоростью производится путем подачи на входы платы прямоугольных сигналов разной скважности. В Бастере это контролируется специальной схемой управления скоростью, однако может успешно эмулироваться с помощью LPT-порта.
Формат: jpg (несколько картинок)
Односкоростная система управления двигателями
{kind=link}
Простейшая схема управления приводом. Четыре входящих провода от LPT порта управляют поворотом рулевого колеса направо или налево, и вращением ведущих двигателей назад или вперед.
Формат: jpg, Размер: 51Кб
{kind=link}
Блок-схема рулевого механизма будущего робота. Используются: несущая рама, двигатель, датчики обратной связи, сработанные на основе схемы компьютерной мыши.
Формат: jpg, Размер: 30Кб
Управление внешними устройствами через LPT-порт
Дока по использованию LPT-порта. Представлены примеры схем подключения внешних устройств к данному порту, простейший вариант текста программы для тестирования.
Формат: html

| Общие сведения | Механика | Программирование | Дополнительно | |
| Документы и статьи | Шасси | Система управления | Полезности | |
| Концепция развития | Питание | Сайты о роботах | ||
| Датчики | ||||
| Состояние | ||||
Работа с LPT-портом
Данные по LPT-порту передаются параллельно. Это значит что за один шаг передаётся один байт, в то время, как по последовательному порту за шаг передаётся один бит. Так как в одном байте восемь битов, то у нас в распоряжении сразу восемь выходов. Изначально LPT-порт предназначался для работы с принтером. Вот как используются его выводы:
- 1 - Компьютер посылает сигнал, чтобы сообщить принтеру о готовности. При отсутствии сигнала на этом выходе, принтер не выполнит ни одной команды с других.
- 2-9 – Выходы, по которым посылаются данные в принтер. Именно они нас и интересуют.
- 10-17 – Входы, по которым принтер сообщает своё состояние, например, кончилась бумага.
- 18-25 – Общий провод. Чаще всего он соединён с корпусом компьютера.
Сигналы на выходах 2-9 – логические 0 или 1. Нам необходимо изменять состояние выводов по отдельности или вместе. Для этого нужно в порт посылать число следующим образом: каждому выводу соответствует один бит.
Чтобы включить все выводы, нужно послать в порт число 255, чтобы выключить все – 0. Если нужно подать сигнал на несколько выводов, в порт нужно послать сумму соответствующих чисел. Для того, чтобы послать число в порт, можно использовать простейшую программу на Паскале:
program lpttest; var data:byte; begin writeln(data); readln(data); port[memw[$0040:$0008]:=data; end.
Чтобы проверить работу программы, можно просто напрямую к порту подключить светодиод, но чтобы управлять более мощными устройствами, необходимо собрать схему согласования.

Самая простая схема состоит из транзистора и реле. Реле можно использовать любое – исходя из напряжения питания. Единственный недостаток схемы – при внутреннем коротком замыкании транзистора напряжение питания может попасть в порт, из-за чего из строя может выйти не только контроллер порта, но и вся системная плата.
Этого
недостатка нет в схеме, собранной на оптроне.

Он обеспечивает
гальваническую развязку с портом. Схема
очень проста и может управлять любыми
устройствами – всё зависит от реле.
Но лучше вообще отказаться от реле и управлять бытовой техникой, не выходя из-за компьютера.
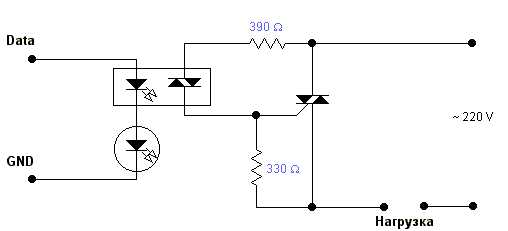
Устройство собрано на симисторе. В цепь оптрона включен светодиод, сигнализирующий о работе устройства. Необходимо собрать несколько (до восьми) таких устройств и разместить их в одном корпусе, например от старого сетевого фильтра, поставив около каждой розетки светодиод.
Это не все схемы, которые можно использовать. Исходя из заданных требований, можно собрать своё устройство. Главное – не сжечь LPT-порт ПК.
|
Перепечатка материалов сайта запрещена. E-mail: |

|

|

|

|